einsum을 활용한 doppler rate 계산 과정 일부 최적화
Cumming 책 4.3. The Range Equation
Cumming과 Wong의 명저인 《digital processing of SAR》를 구현하다 적용한 최적화 하나.
Doppler rate를 계산하기 위해서는 radar velocity(effective velocity) \(V_r\)을 계산해야 한다.
그리고, 이를 계산하려면 지상에서 빔이 이동하는 속도 \(V_g\)를 계산해야 한다.
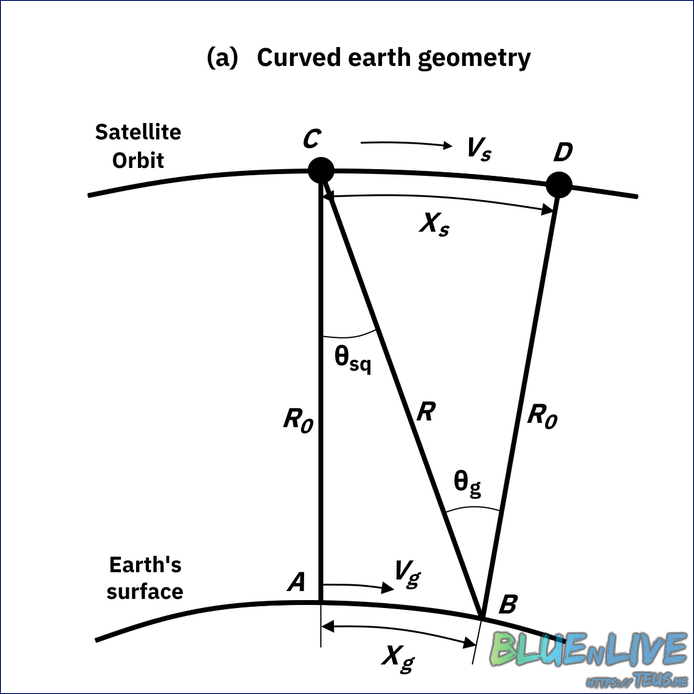
위 그림에서 위성의 위치 \(C\)를 알면 \(V_s\)를 알 수 있다.
그리고, \(C\)와 빔 벡터를 통해 지표면과의 접점 \(B\)를 알 수 있다.
그리고, 이 값들을 통해 \(\theta_{sq}\), \(\theta_g\)를 계산할 수 있다.
그러면, 아래와 같은 식이 성립한다.
\(\begin{align}
\sin \theta_{sq} : \sin \theta_g = V_g : V_s
\end{align}\)
Cumming 책에는 이 식을 각의 크기가 작기 때문에 아래와 같이 근사할 수 있다고 써두었다.
\(\begin{align}
\theta_{sq} : \theta_g = V_g : V_s
\end{align}\)
삼각함수라고?
그런데, 생각을 조금만 바꿔보면 이러한 근사를 생략했을 때 오히려 더 빠르고 정확한 계산을 할 수 있다.
두 벡터 \(\overrightarrow{a}\), \(\overrightarrow{b}\)가 있을 때 두 벡터 사이의 각도 \(\theta\)는 아래와 같이 계산된다.
\(\begin{align}
\cos \theta = \frac {\overrightarrow{a} \cdot \overrightarrow{b}}{\left\| \overrightarrow{a} \right\| \cdot \left\| \overrightarrow{b} \right\|}
\end{align}\)
그런데, 우리가 원하는 값은 \(\theta\)가 아니라 \(\sin \theta\)다.
따라서, 아래의 식을 적용하면…
\(\begin{align}
\sin \theta = \sqrt{1 - \cos ^2 \theta}
\end{align}\)
아래와 같이 원하는 값을 도출할 수 있다.
\(\begin{align}
\sin \theta = \sqrt {1 - \frac {\left ( \overrightarrow{a} \cdot \overrightarrow{b} \right )^2}{\left ( \left\| \overrightarrow{a} \right\| \cdot \left\| \overrightarrow{b} \right\| \right )^2}}
\end{align}\)
파이썬에서의 활용 #1
두 개의 1차원 배열 B, C가 있고, V_s를 알고 있다면, V_g는 아래와 같이 계산할 수 있다.
B_to_C = C - B
V_g = V_s * np.sqrt((1 - (np.dot(C, B_to_C) / (np.linalg.norm(C) * np.linalg.norm(B_to_C))) ** 2) /
(1 - (np.dot(B, B_to_C) / (np.linalg.norm(B) * np.linalg.norm(B_to_C))) ** 2))
여기서 우리가 최적화해야 할 부분은 np.sqrt 이후의 내용이다.
따라서, 이후는 가능한 간략하게 필요한 내용만 적어본다.
정공법으로 적으면 아래와 같다.
위에 적은 내용과 사실상 동일하다.
C = np.array([1,2,3])
B = np.array([3,4,5])
B_to_C = C - B
np.sqrt((1 - (np.dot(C, B_to_C) / (np.linalg.norm(C) * np.linalg.norm(B_to_C))) ** 2) /
(1 - (np.dot(B, B_to_C) / (np.linalg.norm(B) * np.linalg.norm(B_to_C))) ** 2))
일단, 이후의 과정을 위해 좀 번거롭게 제곱을 각 항으로 분산시킨다.
물론, 결과값은 동일하다.
np.sqrt((1 - (np.dot(C, B_to_C) ** 2 / (np.linalg.norm(C) ** 2 * np.linalg.norm(B_to_C) ** 2))) /
(1 - (np.dot(B, B_to_C) ** 2 / (np.linalg.norm(B) ** 2 * np.linalg.norm(B_to_C) ** 2))))
그런데, np.linalg.norm()은 의외로 좀 느리게 동작한다.
그래서 아래와 같이 변형해본다.
이렇게 수정하면 불필요한 sqrt() 다음의 제곱을 생략할 수 있다.
np.sqrt((1 - (np.dot(C, B_to_C) ** 2 / np.dot(C, C) / np.dot(B_to_C, B_to_C))) /
(1 - (np.dot(B, B_to_C) ** 2 / np.dot(B, B) / np.dot(B_to_C, B_to_C))))
여기서 np.dot(C, B_to_C)는 강력한 einsum을 활용하면 np.einsum('i,i->',C,B_to_C)로 변형할 수 있다.
그럼 아래와 같이 쓸 수 있다.
np.sqrt((1 - (np.einsum('i,i->',C,B_to_C) ** 2 / np.einsum('i,i->',C,C) / np.einsum('i,i->',B_to_C,B_to_C))) /
(1 - (np.einsum('i,i->',B,B_to_C) ** 2 / np.einsum('i,i->',B,B) / np.einsum('i,i->',B_to_C,B_to_C))))
마지막으로 중복 연산을 방지하기 위해 아래와 같이 수정하면 끝.
sqr_norm_B_to_C = np.einsum('i,i->',B_to_C,B_to_C)
np.sqrt((1 - (np.einsum('i,i->',C,B_to_C) ** 2 / np.einsum('i,i->',C,C) / sqr_norm_B_to_C)) /
(1 - (np.einsum('i,i->',B,B_to_C) ** 2 / np.einsum('i,i->',B,B) / sqr_norm_B_to_C)))
파이썬에서의 활용 #2
위에 길게 적긴 했지만, 사실 B, C가 위치 하나만을 기술할 때는 눈에 띄는 성능 향상은 없다.
이 최적화는 B, C가 연속되는 위성의 위치 수백개 이상을 기술할 때 의미가 있는 방식이다.
여기서는 설명을 간단하게 하기 위해 위성의 위치 2개를 저장한 것으로 기술하는 것으로 시작한다.
C = np.array([[1,2,3],[2,3,4]])
B = np.array([[3,4,5],[4,5,6]])
B_to_C = C - B
여기서, 일단 np.dot()는 같은 형식으로는 사용할 수 없다.
이 함수를 이용하려면 아래와 같이 변형해야 한다.
# np.dot(C, B_to_C) 적용 불가
np.array([np.dot(C[i], B_to_C[i]) for i in range(C.shape[0])])
list comprehension이라니… 보기만 해도 성능 이슈가 막 터질 것 같은 위기가 느껴진다.
그래서, 아래와 같이 간단하지만 강력한 einsum의 도움을 구해본다.
np.einsum('ij,ij->i', C, B_to_C)
np.linalg.norm() 역시 완전히 동일하게는 사용할 수 없다.
2차원 배열에서 각 행의 norm()을 계산하려면 축을 지정해야 한다.
이를 모두 적용하면 아래와 같이 바꿀 수 있다.
np.sqrt((1 - (np.einsum('ij,ij->i', C, B_to_C) / (np.linalg.norm(C,axis=1) * np.linalg.norm(B_to_C,axis=1))) ** 2) /
(1 - (np.einsum('ij,ij->i', B, B_to_C) / (np.linalg.norm(B,axis=1) * np.linalg.norm(B_to_C,axis=1))) ** 2))
앞에서도 적었듯, np.linalg.norm()은 좀 느리다.
따라서, 위와 동일한 최적화를 적용해본다.
sqr_norm_B_to_C = np.einsum('ij,ij->i', B_to_C, B_to_C)
np.sqrt((1 - (np.einsum('ij,ij->i', C, B_to_C) ** 2 / np.einsum('ij,ij->i', C, C) / sqr_norm_B_to_C)) /
(1 - (np.einsum('ij,ij->i', B, B_to_C) ** 2 / np.einsum('ij,ij->i', B, B) / sqr_norm_B_to_C)))
이렇게 하면, 많은 수의 위성 위치에 대해서 최적화된 성능으로 \(V_g\)를 계산할 수 있다.